Problem
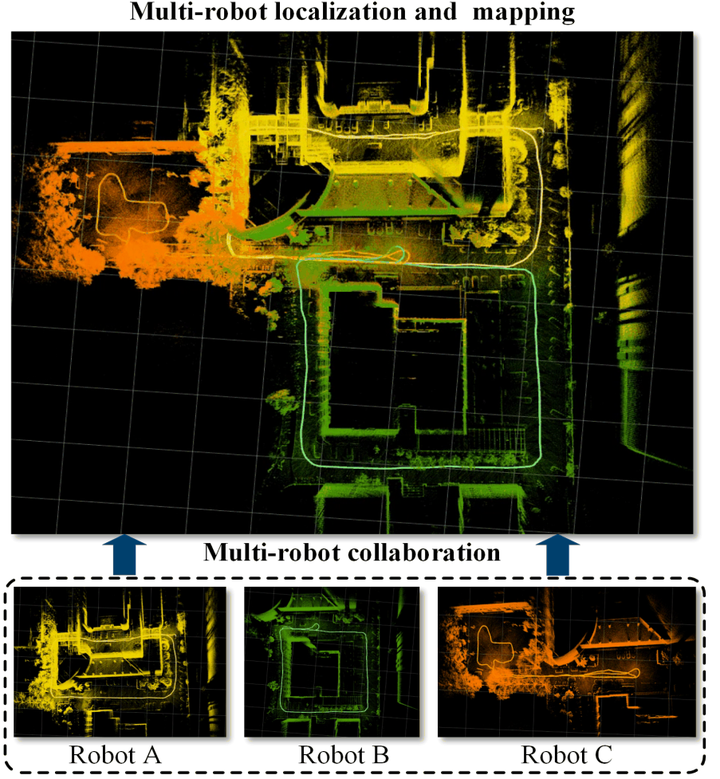
How to efficiently build a large-scale consistent map by using multiple robots?
Method
Learning-based place recognition by using lidar and 4D radar point clouds
Global bundle adjustment
Related papers
GBA-LIOM: Global Bundle Adjustment Enhanced LiDAR–Inertial Odometry and Mapping
SNAIL Radar: A Large-Scale Diverse Benchmark for Evaluating 4D-Radar-Based SLAM
4D RadarPR: Context-Aware 4D Radar Place Recognition in harsh scenarios
Funding
As a subtopic, partially funded by the National Key Research and Development Program of China (International Scientific and Technological Cooperation Program) under Grant 2022YFE0139300.