Problem
Large amounts of remotely sensed imagery are being captured, necessitating automatic interpretation. One probably important step in understanding an image is to segment it into meaningful regions of pixels. How can the remotely sensed images be segmented efficiently while facilitating subsequent semantic analysis?
Method
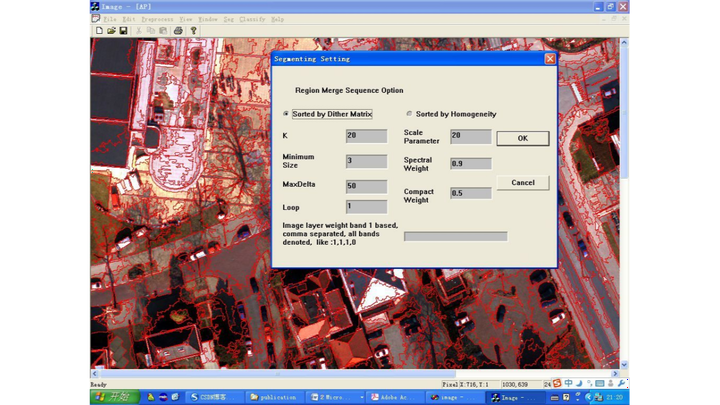
The graph-based segmentation or an inverse quadtree merging method clusters neighboring image pixels into region primitives. Then a hierarchical region growing technique grows these regions by iteratively merging neighboring regions satisfying color, proximity, and border constraints. To evenly distribute pairs of candidate regions for merging, the ordering of candidate pairs based on an increasing merging cost and the ordering based on a dither matrix have been implemented.
Key results
These segmentation approaches were used to segment high resolution remotely sensed images, achieving comparable performance to the hierarchical method in eCognition and the watershed transform method in ENVI.
Related papers: