 Image credit: Unsplash
Image credit: UnsplashType
Publication
In ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences
Problem
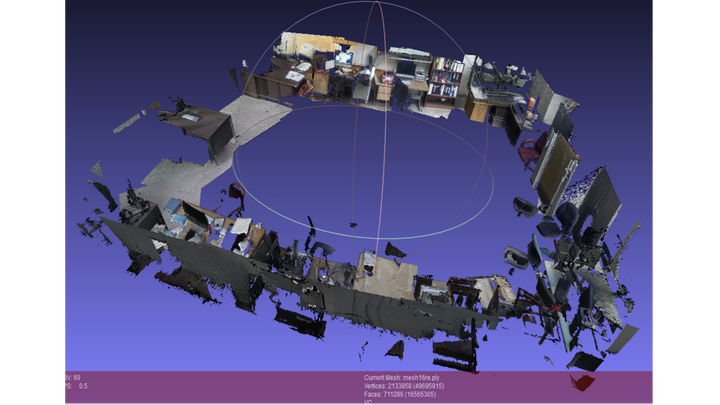
It is possible to reconstruct the digital model of a workplace with KinectFusion. But as the area expands, the model suffers from distortion.
Method
To improve the accuracy of odometry, motion estimates derived from ICP with the depth data, SIFT matching with the RGB data, and the IMU data are fused in a loosely coupled manner.
Key Results
- Large scale (20m x 20m) consistent 3D reconstruction is realized by volume shifting and loop closure.
- The coarse-to-fine iterative closest point (ICP) algorithm, the SIFT odometry, and IMU odometry are combined to robustly and precisely estimate poses.