Consistent right-invariant fixed-lag smoother with application to visual inertial SLAM
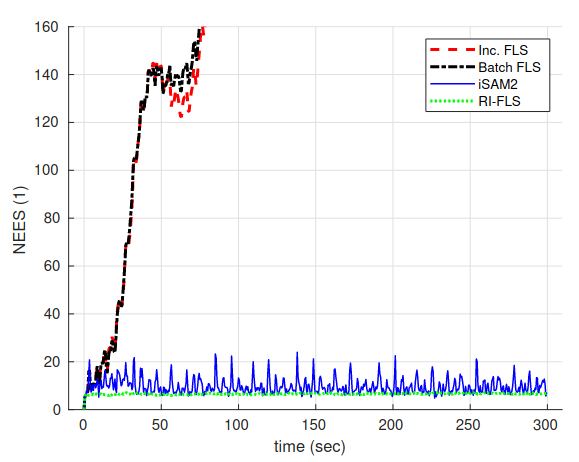 Image credit: Unsplash
Image credit: UnsplashAbstract
As the first novelty, to bypass the complexity of analysis with the classic observability matrix, we show that observability analysis of FLSs can be done equivalently on the linearized system. Second, we prove that the inconsistency issue in the traditional FLS can be elegantly solved by the right invariant error formulation without artificially correcting Jacobians.
Type
Publication
In 35th AAAI Conference on Artificial Intelligence
Use right-invariant error to ensure covariance consistency of smoothing-based estimators