Observability analysis and keyframe-based filtering for visual inertial odometry with full self-calibration
Type
Publication
IEEE Transactions on Robotics
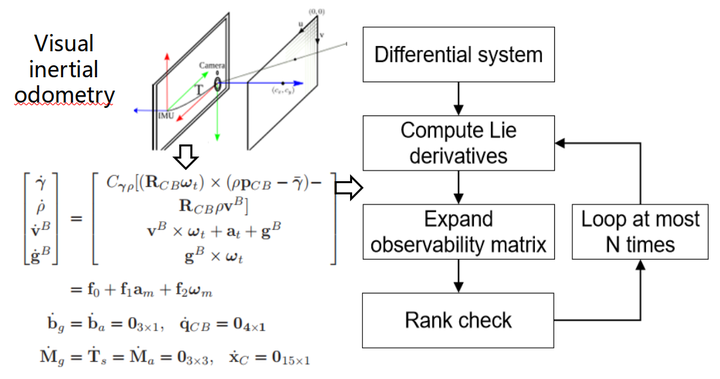
It is proved that full self-calibration of a visual inertial system is weakly observable under general motion;
Also keyframe-based filtering effectively deals with low-parallax.
Related projects: